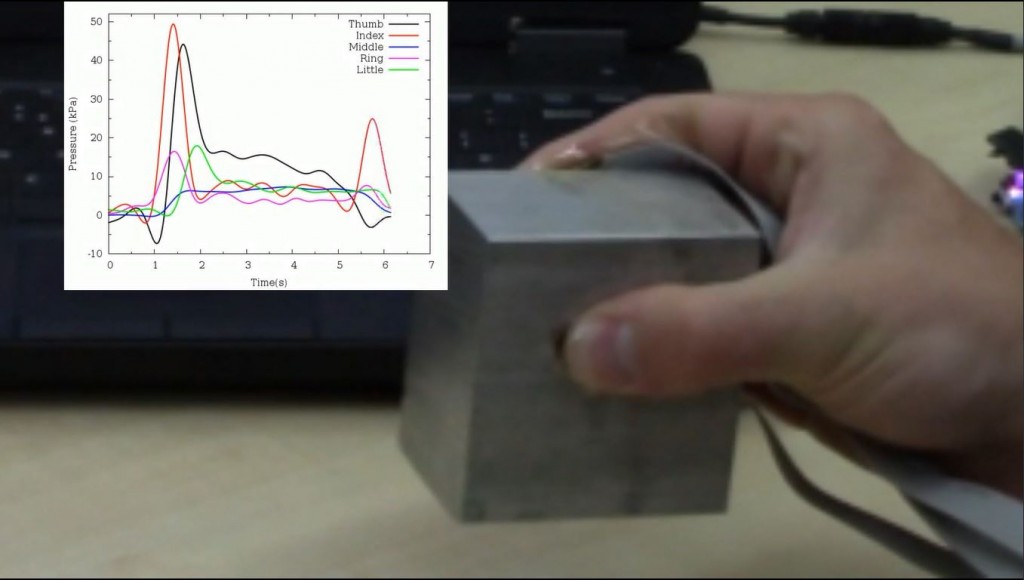
Finger tip object/interface
- Attached to fingertip of a human or prosthetic hand
- Real-time gripping and slipping detection
- Sensory feedback for neuro-prosthetics
- Hand biomechanical analysis
Finger tip
--
/
--
We acknowledge the collaboration and support from the SenseBack project, funding from by the Engineering and Physical Sciences Research Council (EPSRC), and support from the Institue of Life Sciences (IFLS), University of Southampton.